
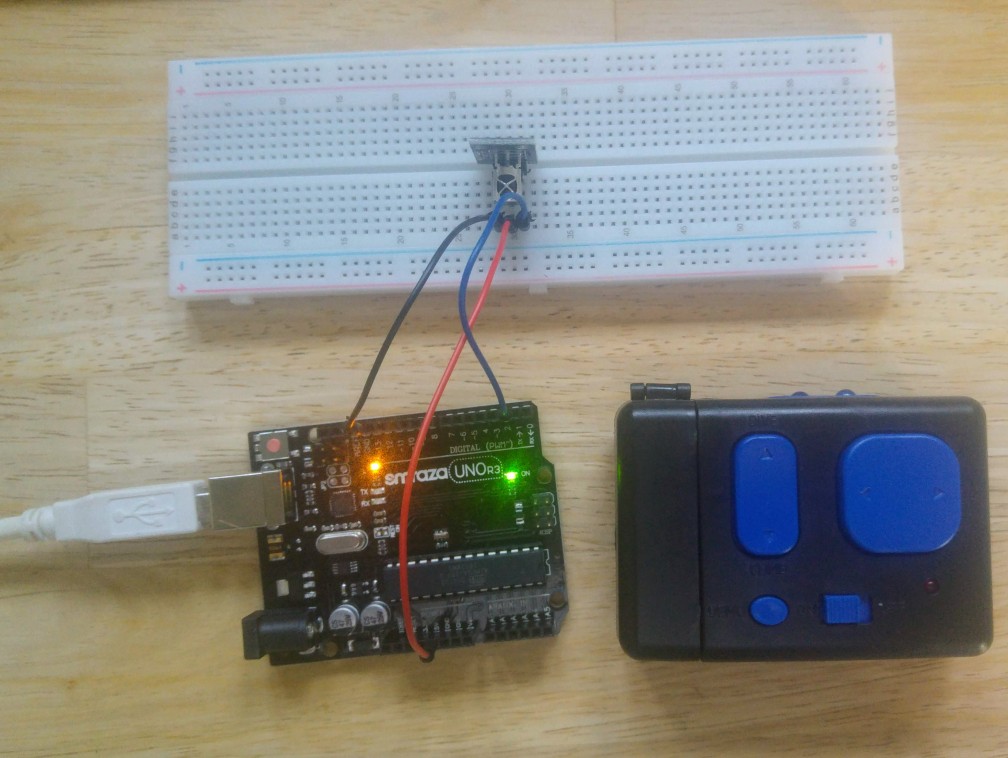
So, time for a little calibration experiment. Flying shark is remotely controlled via infrared, so the best guess is via ordinary IR codes. Hence, I’ve setup a digital IR receiver on the breadboard and used the well-known IRRemote library to log/monitor the received readings via the serial port.
An this is how Frankenshark`s motoric capabilities read over the wire:
// bootstrap for pairing & intermediate connect
// IR_Code: 444AD90D, Bits: 32
// IR_Code: 444AD90D, Bits: 32
// IR_Code: 444AD90D, Bits: 32
// IR_Code: 444AD90D, Bits: 32
// IR_Code: 444AD90D, Bits: 32
// IR_Code: 444AD90D, Bits: 32
// left flap
// IR_Code: 77CCE159, Bits: 32
// right flap
// IR_Code: 1DCF2C27, Bits: 32
// dive/nose down
// IR_Code: EF1AF1FB, Bits: 32
// climb/nose up
// IR_Code: 5F5B64A8, Bits: 32
// demo mode
// IR_Code: 6FECA321, Bits: 32
Next, I need to order an IR sender and bloody helium …
